|
vtlib library
|
Public Member Functions | |
| DTErr | BasicInit (const vtElevationGrid *pGrid) |
| virtual void | SetPolygonTarget (int iPolygonCount) |
| int | GetPolygonTarget () const |
| int | NumDrawnTriangles () const |
 Public Member Functions inherited from vtDynGeom Public Member Functions inherited from vtDynGeom | |
| int | IsVisible (const FSphere &sphere) const |
| int | IsVisible (const FPoint3 &point0, const FPoint3 &point1, const FPoint3 &point2, const float fTolerance=0.0f) const |
| int | IsVisible (const FPoint3 &point, float radius) const |
| bool | IsVisible (const FPoint3 &point) const |
| Public Member Functions inherited from vtGeode | |
| void | AddMesh (vtMesh *pMesh, int iMatIdx) |
| void | RemoveMesh (vtMesh *pMesh) |
| void | RemoveAllMeshes () |
| void | AddTextMesh (vtTextMesh *pMesh, int iMatIdx, bool bOutline=true) |
| uint | NumMeshes () const |
| vtMesh * | GetMesh (int i) const |
| vtTextMesh * | GetTextMesh (int i) const |
| Public Member Functions inherited from NodeExtension | |
| void | SetEnabled (bool bOn) |
| bool | GetEnabled () const |
| void | SetCastShadow (bool b) |
| Set this node to cast a shadow, if it is under a vtShadow node. Default is false. | |
| bool | GetCastShadow () |
| Get whether this node casts a shadow. | |
| void | GetBoundSphere (FSphere &sphere, bool bGlobal=false) |
| Get the Bounding Sphere of the node. | |
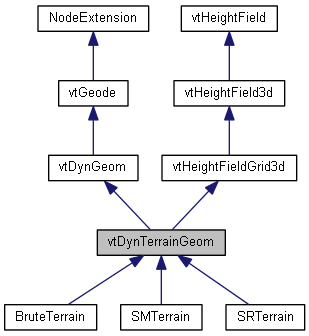
This class provides a framework for implementing any kind of dynamic geometry for a heightfield terrain grid. It is the parent class which contains common fuctionality used by each of the terrain CLOD implementations.
| DTErr vtDynTerrainGeom::BasicInit | ( | const vtElevationGrid * | pGrid | ) |
Sets up the vtDynTerrainGeom object. The units, extents, height range, grid dimensions and other properties are copied from the supplied elevation grid.
This is generally called from the Init() method of a subclass.
| int vtDynTerrainGeom::GetPolygonTarget | ( | ) | const |
Get the polygon target, which is the number of polygons (generally triangles) which the CLOD algorithm will try to maintain.
| int vtDynTerrainGeom::NumDrawnTriangles | ( | ) | const |
Return the number of triangles that were rendered by this dynamic terrain last frame.
|
virtual |
Set the polygon target, which is the number of polygons (generally triangles) which the CLOD algorithm will try to maintain.
Reimplemented in SRTerrain.
 1.8.10
1.8.10

